Calibration Tool Manual¶
Introduction¶
1.1 Support Platform¶
Currently the calibration tool only supports Ubuntu 16.04 LTS, but support the official, ROS multiple version of OpenCV dependencies.
Platform |
Architecture |
Different dependence |
|---|---|---|
Ubuntu 16.04 LTS |
x64(amd64) |
libopencv-dev |
Ubuntu 16.04 LTS |
x64(amd64) |
ros-kinetic-opencv3 |
1.2 Tools description¶
Deb/ppa installation package is available on Ubuntu. The architecture, dependencies, and versions will be distinguished from the name:
mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
mynteye-s-calibrator-opencv-ros-kinetic-1.0.0_amd64.deb
Dependency identifier |
Dependency package |
Detailed description |
|---|---|---|
opencv-official |
libopencv-dev |
|
opencv-ros-kinetic |
ros-kinetic-opencv3 |
1.3 Deb Toolkit Get¶
Method of Obtaining |
Get address |
|---|---|
Baidu Cloud |
https://pan.baidu.com/s/19rW0fPKUlQj6eldZpZFoAA Extraction code: a6ps |
Google Drive |
https://drive.google.com/open?id=1RsV2WEKAsfxbn-Z5nGjk5g3ml1UDEsDc |
Installation¶
2.1 Installation Preparation¶
Ubuntu 16.04 LTS environment, x64 architecture
Deb package for the calibration tool, select OpenCV dependencies as needed (this step is not required for PPA installation)
2.2 Install ppa Package¶
$ sudo add-apt-repository ppa:slightech/mynt-eye-s-sdk
$ sudo apt-get update
$ sudo apt-get install mynteye-s-calibrator
$ sudo ln -sf /opt/myntai/mynteye-s-calibrator/mynteye-s-calibrator /usr/local/bin/ mynteye-s-calibrator
2.3 Install deb Package¶
Install the deb package with udo dpkg -i:
$ sudo dpkg -i mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
...
(Reading database ... 359020 files and directories currently installed.)
Preparing to unpack mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb ...
Unpacking mynteye-s-calibrator (1.0.0) over (1.0.0) ...
Setting up mynteye-s-calibrator (1.0.0) ...
If you encounter an error that the dependency package is not installed, for example:
$ sudo dpkg -i mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
Selecting previously unselected package mynteye-s-calibrator.
(Reading database ... 358987 files and directories currently installed.)
Preparing to unpack mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb ...
Unpacking mynteye-s-calibrator (1.0.0) ...
dpkg: dependency problems prevent configuration of mynteye-s-calibrator:
mynteye-s-calibrator depends on libatlas-base-dev; however:
Package libatlas-base-dev is not installed.
dpkg: error processing package mynteye-s-calibrator (--install):
dependency problems - leaving unconfigured
Errors were encountered while processing:
mynteye-s-calibrator
You can continue use sudo apt-get -f install to finished install
$ sudo apt-get -f install
Reading package lists... Done
Building dependency tree
Reading state information... Done
Correcting dependencies... Done
The following additional packages will be installed:
libatlas-base-dev
Suggested packages:
libblas-doc liblapack-doc
The following NEW packages will be installed:
libatlas-base-dev
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
1 not fully installed or removed.
Need to get 3,596 kB of archives.
After this operation, 30.8 MB of additional disk space will be used.
Do you want to continue? [Y/n]
Get:1 http://cn.archive.ubuntu.com/ubuntu xenial/universe amd64 libatlas-base-dev amd64 3.10.2-9 [3,596 kB]
Fetched 3,596 kB in 3s (1,013 kB/s)
Selecting previously unselected package libatlas-base-dev.
(Reading database ... 358993 files and directories currently installed.)
Preparing to unpack .../libatlas-base-dev_3.10.2-9_amd64.deb ...
Unpacking libatlas-base-dev (3.10.2-9) ...
Setting up libatlas-base-dev (3.10.2-9) ...
update-alternatives: using /usr/lib/atlas-base/atlas/libblas.so to provide /usr/lib/libblas.so (libblas.so) in auto mode
update-alternatives: using /usr/lib/atlas-base/atlas/liblapack.so to provide /usr/lib/liblapack.so (liblapack.so) in auto mode
Setting up mynteye-s-calibrator (1.0.0) ...
How To Use¶
3.1 Preparation For Use¶
MYNT EYE S Camera
Checkerboard
Evenly illuminated scene
3.2 Use Command¶
After installing the calibration tool, you can run the mynteye-s-calibrator command directly on the terminal to calibrate. -h can see its options:
$ mynteye-s-calibrator -h
Usage: mynteye-s-calibrator [options]
help: mynteye-s-calibrator -h
calibrate: mynteye-s-calibrator -x 11 -y 7 -s 0.036
Calibrate MYNT EYE S device.
Options:
- -h, --help
show this help message and exit
- -x WIDTH, --width=WIDTH
The chessboard width, default: 11
- -y HEIGHT, --height=HEIGHT
The chessboard height, default: 7
- -s METERS, --square=METERS
The chessboard square size in meters, default: 0.036
- -n NUMBER, --number=NUMBER
The number of imagestools to use for calibration, default: 11
- -p PATH, --path=PATH
The path to save the result, default: folder name using device’s SN
-x -y -s Used to set the width, height, and grid size of the calibration plate. Width and height refer to the number of black and white intersections in the horizontal and vertical directions of the checkerboard. Square size in meters.
3.3 Steps For Usage¶
First, connect the MYNT EYE S camera.
Then, run the mynteye-s-calibrator <calibration board parameter> command in the terminal.
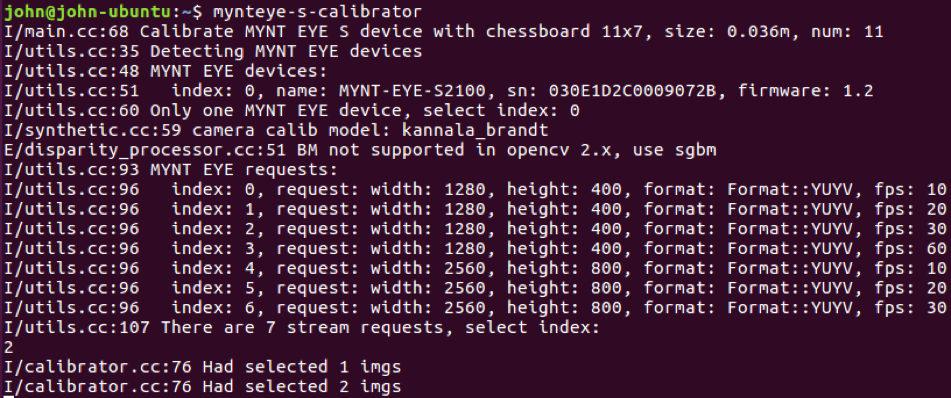
Follow the prompts to select an index for the camera’s resolution, perform image calibration at this resolution
The S1030 camera only need calibrate 752*480 resolution. The S2100 camera need calibrate 2560*800 and 1280*400 resolutions.
As far as possible, let the calibration plate cover the left and right eye images of the camera,
and take care of the surroundings (maximum distortion). The calibration tool will automatically evaluate the qualified image for the calibration calculation and will indicate on the terminal how many have been selected.
Reference acquisition image, as follows:





Note: p_x, p_y, size, skew respectively indicate the scale of the calibration plate on the x-axis, y-axis, zoom, and tilt when the image is acquired. Make a point for reference.
Once the number of images acquired by the calibration needs is reached, the calibration calculation will be performed. The output is as follows:
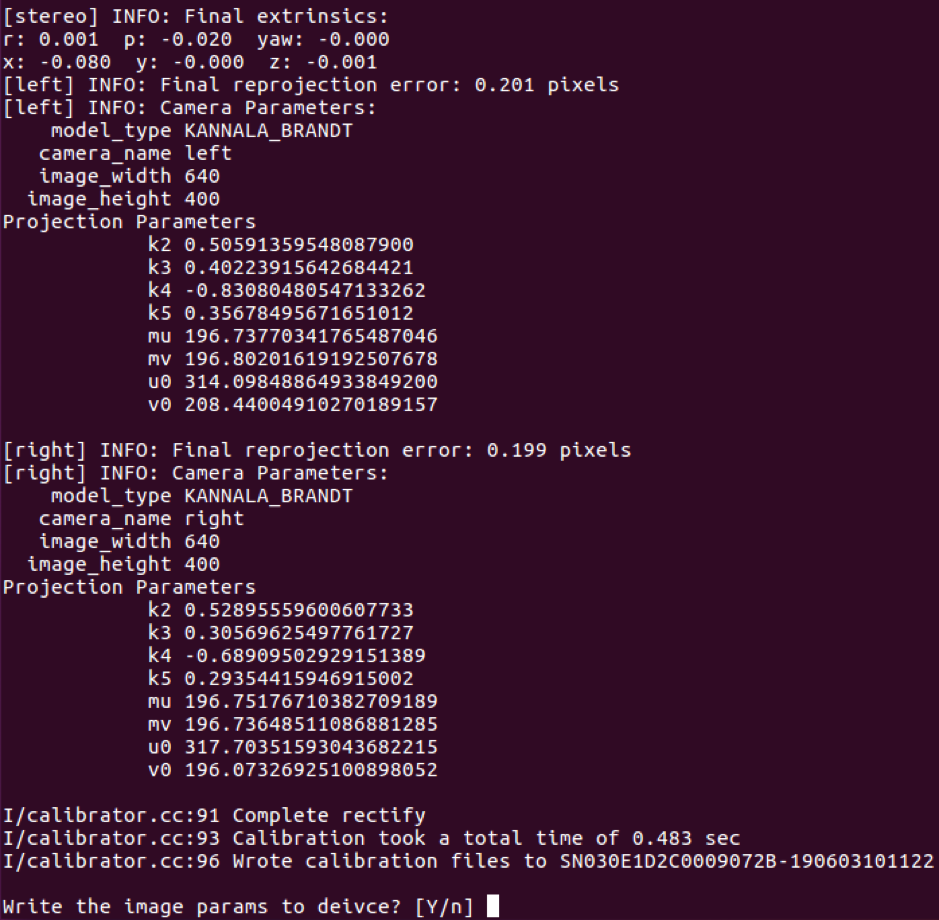
The terminal will print out the left and right purpose calibration results.
The calibration results will be written into the files in <SN number> directory.
camera_left.yaml: Left eye parameter
camera_right.yaml: Right eye parameter
extrinsics.yaml: Binocular external parameter
img.params.equidistant: Camera parameters, which can be used for S SDK writing
stereo_reprojection_error.yaml: Reprojection error
Finally, you will also be asked if you want to write to the camera device. Enter or y to confirm
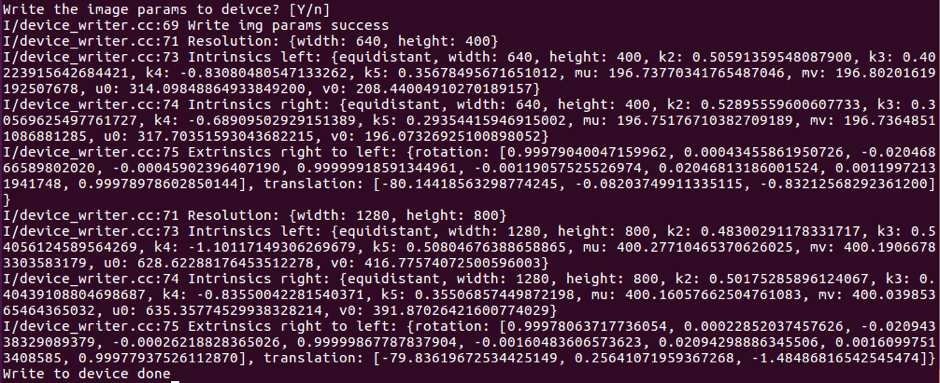
After writing to the device, you will be prompted with “Write to device done”.
3.4 Calibration result¶
Calibration result, It is desirable to have a reprojection error of 0.2 or less. If exceeds 1, it needs to be recalibrated.
Reprojection error, visible output after calibration completion “Final reprojection error: 0.201
Pixels”, or see the calibration result file “stereo_reprojection_error.yaml”.